Mechatronics Engineering @ University of Waterloo
Engineer interested in reinforcement learning, dynamics, perception, and mapping for robotic systems.
Experience
Incoming Winter 2026, developing ROS 2 software, depth camera-based SLAM algorithms and hardware systems for autonomous caregiving robots.
Developed payload devices mounted to DJI drones for wildfire byproduct monitoring. All designs made open source, utilized by Sawback Technologies and more.
Developing autonomous vehicle systems. Working on the ROS code for a miniature F1 car (F1TENTH) enabling simultaneous processing of sensor data from cameras, LiDAR, IMUs, and odometers. Recently designing a reinforcement learning training policy to teach a humanoid hand to grasp objects.
Projects
Interactive 3D Models - Click for Gallery
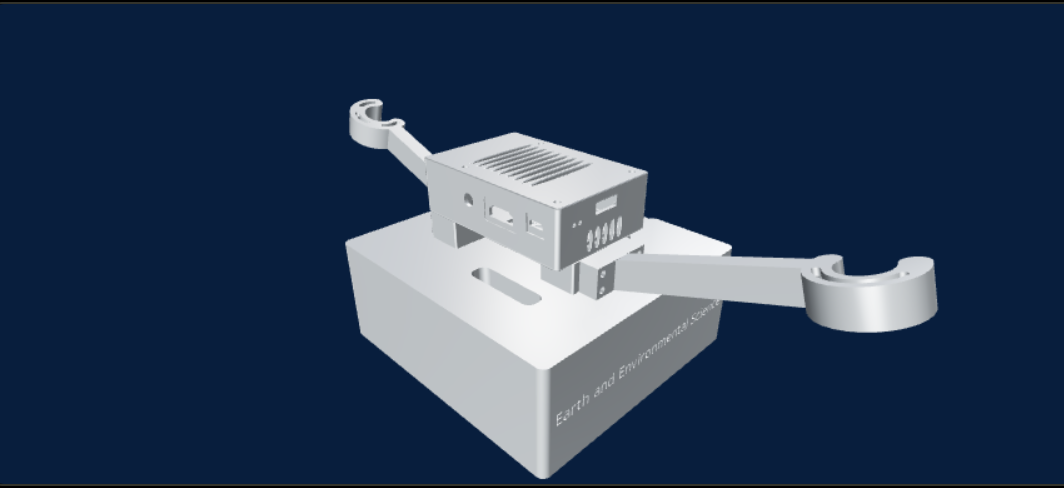
Air Quality Monitor
OnShape
KiCad
ESP32
Raspberry Pi
.png)
Quadruped
Inverse Kinematics
Gazebo
ROS2
Raspberry Pi
.png)
Converyor Belt System
ESP32
Multithreading
OnShape
FreeRTOS
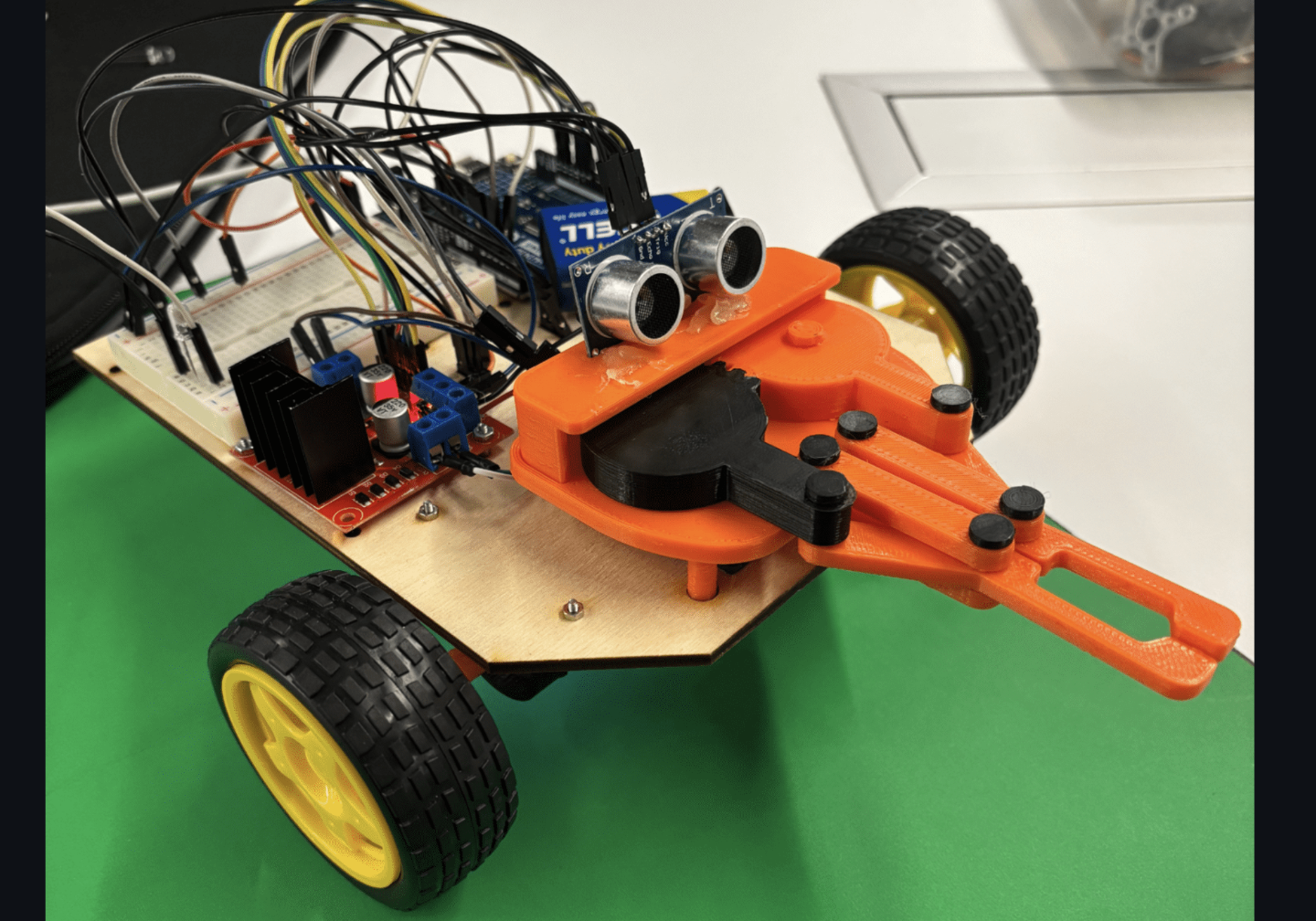
Pathfinding Robot
Arduino
KiCad
C++
.png)
Block Sorting and Collection Robot
C++
LEGO Mindstorms
OnShape
A collection of my current favorite tracks and what I'm listening to right now.